秋月に売っているSTM32チップ周辺の接続について
はじめに
秋月電子で売っているstmチップには2つ種類があります.
どちらにもnucleo32ボードが存在するので,初めて触る方はそっちを勝ったほうがいいと思います.
今回はチップを扱う場合に周辺のピンを今の僕がどうしているかを述べていきます.
基本的にstが公表しているnucleoの回路図を参考にしています.
パッケージ
f303もf042もどちらもLQFP32というパッケージです.
ブレッドボード等で扱う場合は変換基板を用いています.
この変換器版は裏面がSMDのユニバーサル基板となっているので色々と便利です.
各ピンの処理
未使用ピンの処理
未使用のピンは NC としています.
VDDピンの処理
1,17ピンがVDDとなります.
このマイコンへの供給電圧は3.3Vですので,レギュレータ等で3.3Vを作って入れてやります.
VDDはそれぞれVSSとの間に0.1uFのコンデンサを挟んでいます(パスコン)
VDDAピンの処理
5ピンがVDDAです.
nucleoのデータシートではインダクタ等を挟んでいますがぼくの場合怠慢のためにそのままVDDとつないでいます.
VSS
特に無し.
強いて言えばモーター系統とは電源を分離する.
NRST
4ピンがNRSTです.
NRSTはリセットピンで,0Vになるとリセットします . 僕はスイッチを接続し,リセットスイッチを設けています.
また、SWDの5ピンへと接続します.
SWD関係
23,24ピンがSWD用のピンです.
23ピン : SWDIO : SWDの3ピン
24ピン : SWDCLK : SWDの4ピン
また,書き込みを行う際は電源を投入してからします.
BOOT0
31ピンがBOOT0です.
特殊な用事がないならばBOOT0は10kΩ挟んでVSSで良いと思います.
クロック
2,3ピンが外部クロック用のピンです. 私は外部でクロックを準備するのがだるかったので主に内部クロックを用いています.
SWD用のピンのconfig
| 番 | 名称 |
|---|---|
| 1 | VDD_TARGET |
| 2 | SWCLK |
| 3 | GND |
| 4 | SWDIO |
| 5 | NRST |
| 6 | SWO |
上の表のようになっています.
しかし,私はSWOは無視して1-5ピンを接続しています.
最後に
st-link等で書き込む際は、マイコン側に電源を供給しておかないと書き込めないので注意しましょう.
nucleoボードならusbから電源を供給してくれるので楽です.
では.
STM32F303k8+HALで相補PWM生成を試す(Qiita修正版)
内容
- CubeMXでの設定
- 生成されたプログラムへの追加点
CubeMxでの設定
まず,303k8用にprojectを作成します.
今回はnucleo-303k8を使っていきます.
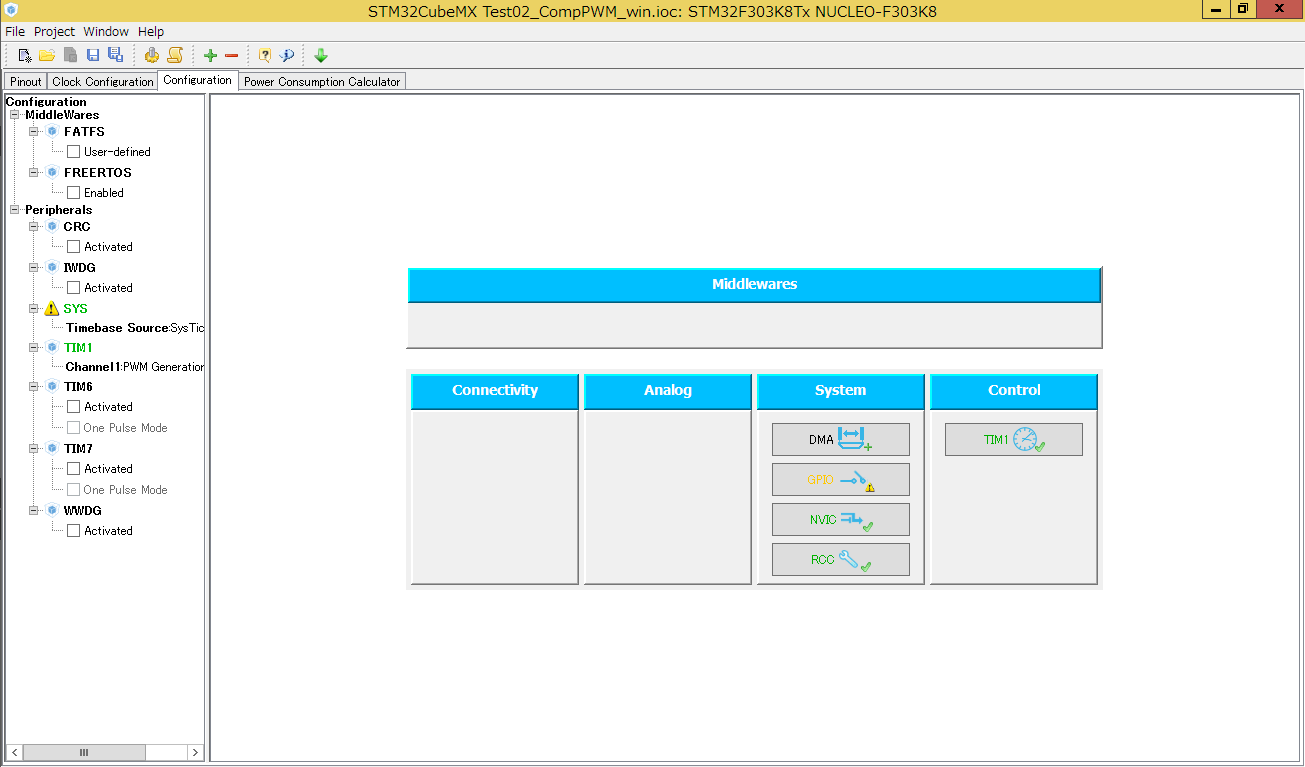
初期状態はこんな感じです。

pinoutタブ
ツリーのPeripheralsからTIM1を展開し,Channel1の設定を
PWM Generation CH1 CH1N
にします.
すると, 18pin → TIM1_CH1 13pin → TIM1_CH1N と設定されます。

注意してほしい点として,303k8では相補PWMはAdvanced timerであるTIM1しか使えません.
TIM15,16,17にも相補のチャンネルがあります.
TIM2やTIM3などのGeneral-purpose timerでは相補PWMはサポートされていないので気を付けましょう.
configurationタブ
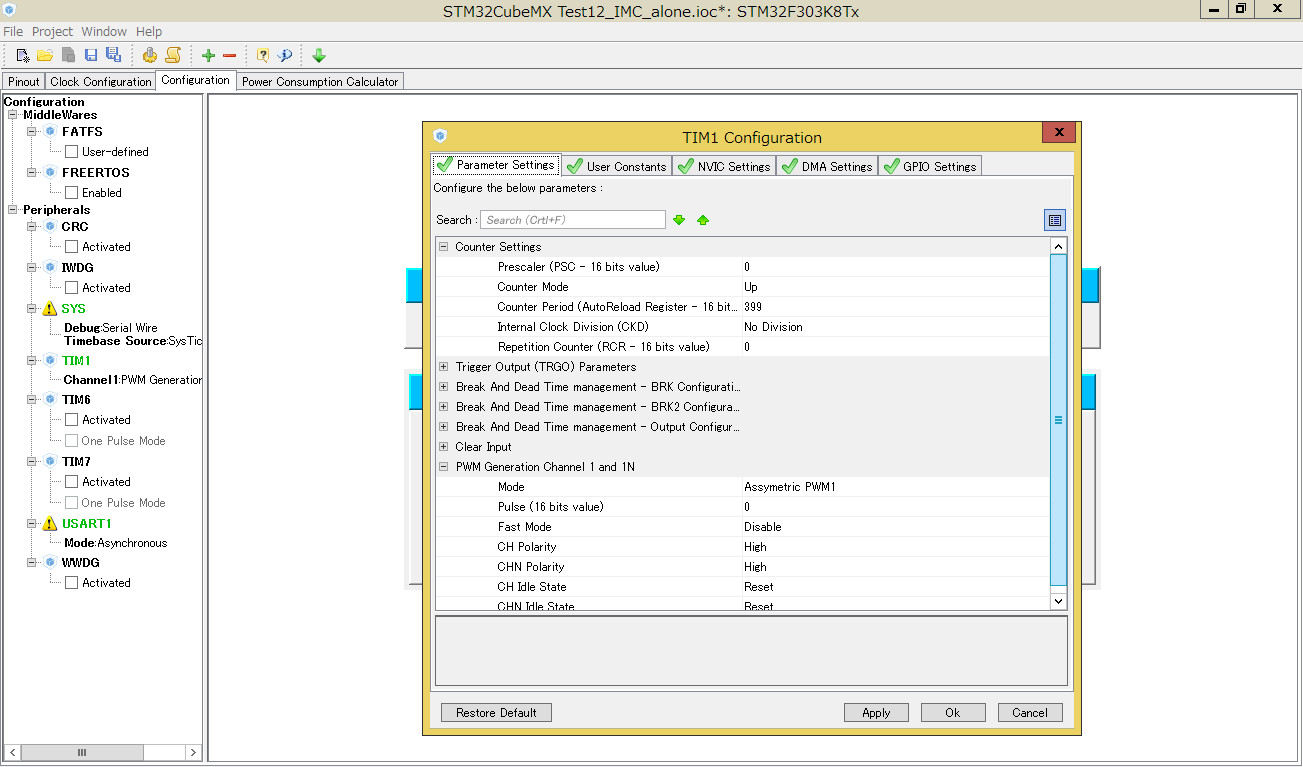
ピンの設定が完了後,configurationタブに移動し,TIM1の各値を設定していきます.
値を設定するタブは - Counter Settings - PWM Generation Channel 1 and 1N の2つです.
まずCounter SettingsタブでPWMの周波数を設定します.
今回は20kHzでPWMを出力するようにPrescalerとCounter Periodを決めます。
動作クロックは内部の8MHzを使うので Prescaler:0 Counter Period:400-1 (カウントは0からなので1引いた399を設定する) とします.
PWM Generation Channel 1 and 1Nタブでは Mode: Assymetric PWM1 とします.
次にデッドタイムの設定を行います.
Break And Dead Time managementタブの一番下の欄に Dead Time:10 (0-255で任意の値) と設定します.
このように設定できるのは見やすくて良いですね.
ここまで設定したら,コードを生成します.
プログラムへの追加
私が作成したソースはこちらに上がっています。Src/main.cが本体です。
自動生成されたソースに追加した関数について解説します.
user関数の追加
PWMを扱いやすくするために以下の関数を定義します. プロトタイプ宣言は適宜お願いします.
void user_tim1_pwm_setvalue(float value)
{
TIM_OC_InitTypeDef sConfigOC;
sConfigOC.OCMode = TIM_OCMODE_ASSYMETRIC_PWM1;
sConfigOC.Pulse = (uint32_t)((400)*value);
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
}
この関数が相補で出力する際のポイントとなります.
出力する値を決めます.
sConfigOC.Pulse = (uint32_t)((400)*value);
設定値を反映します.
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);
CH1へ出力します.
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
CH1Nへ出力します.
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
一番最後のHAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);がないと,CH1Nからは出力されません.
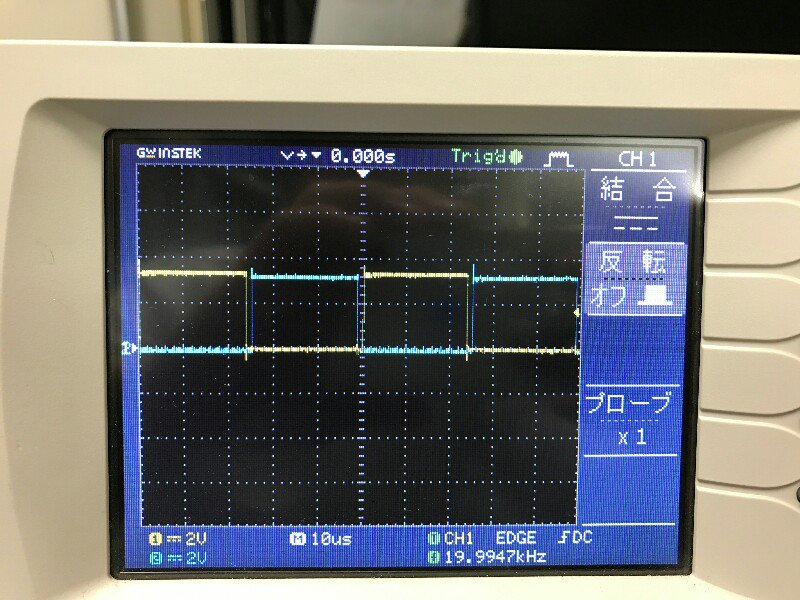
できたらビルドして書き込んで動かしてオシロで見ると以下のような波形が得られると思います.